Naslovnica > Diplomski rad > Sadržaj > 3. Realizacija projekta: izrada DMR-a i DOF-a u programu VirtuoZo
Naslovnica > Diplomski rad > Sadržaj > 3. Realizacija projekta: izrada DMR-a i DOF-a u programu VirtuoZo |
|
|---|---|
3. Realizacija projekta: izrada digitalnog modela reljefa i digitalnog ortofota u programu VirtuoZo3.1. O programu VirtuoZo i njegovim mogućnostimaVirtuoZo je softver za obradu prostornih podataka, koji je 1994. godine razvila tvrtka Supresoft Inc. Radi se o potpuno digitalnom fotogrametrijskom sustavu koji se koristi kao osnova za prikupljanje geografskih informacija direktno iz digitalnih snimki ( URL 2). VirtuoZo objedinjuje sklopovlje i softver koji su posebno dizajnirani za rješavanje mnogih zadataka digitalne fotogrametrije. U ovom poglavlju detaljno je opisan tijek rada na digitalnoj fotogrametrijskoj radnoj stanici - od unosa snimki do ortofoto produkcije. Sažeti prikaz mogućnosti VirtuoZo-a (VirtuoZo V3.5 User's manual 2003): Unos podataka
Automatska aerotriangulacija (AAT)
Unutarnja orijentacija
Relativna orijentacija
Apsolutna orijentacija
Stvaranje epipolarnih slika
Pripremna obrada snimki za usklađivanje
Usklađivanje snimki
Prikazivanje i uređivanje rezultata usklađivanja
Generiranje DMR-a i DMV-a
Automatsko stvaranje ortoslika
Automatsko generiranje slojnica
Digitaliziranje objekata
Prikaz snimki u normalnom i stereo načinu rada Perspektivni prikaz
Spajanje DMV-ova i mozaiciranje ortoslika Skupna obrada
Eksportiranje podataka
Alati
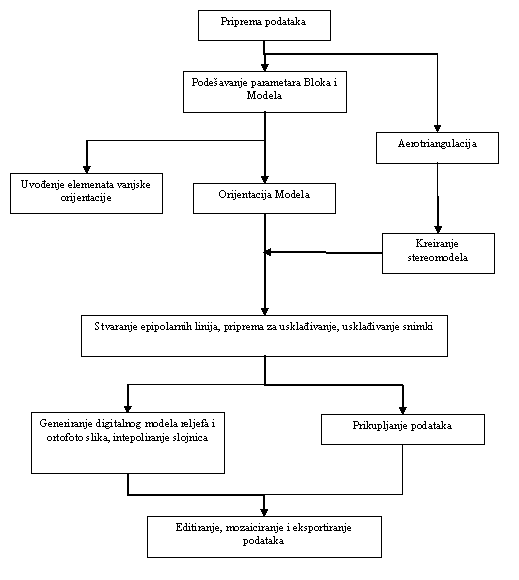
3.2. Općeniti tijek rada u VirtuoZo-uNa Slici 1. shematski je prikazan tijek rada u VirtuoZo-u. Pojedine faze izrade detaljnije su objašnjene u narednim potpoglavljima.
Slika 1. Općeniti tijek rada u VirtuoZo-u 3.3. Kreiranje Bloka i ModelaGlavno sučelje VirtuoZo-a sastoji se od radnog prostora koji se nalazi u sredini, linije glavnog izbornika u gornjem dijelu, te statusne trake u podnožju prozra. Glavni izbornik nudi jedanaest padajućih izbornika: File, Setup, Triangulation, Process, Products, Mosaic, Digitize, View, Tools, Wizard i Help ( Slika 2).
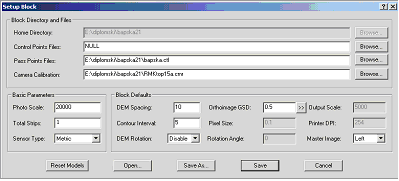
Slika 2. Glavno sučelje VirtuoZo-a Odabirom naredbe File > Open Block u glavnom izborniku moguće je izvršiti dvije radnje: kreirati novi ili otvoriti već postojeći blok. U VirtuoZo-u, za razliku od drugih programa, ne postoji naredba New Block. Naredba Open Block otvara dijaloški okvir Open or Create Block, a ime bloka upisuje se u tekstualni okvir File Name. Ime bloka ne smije sadržavati prazna mjesta. Ukoliko upisano ime bloka ne postoji, otvoriti će se dijaloški okvir Setup Block ( Slika 3) u kojem se zadaju slijedeći parametri: Home Directory – Ime direktorija u kojem je blok spremljen. Control Points File - Opcija za unošenje imena datoteke koja sadrži kontrolne točke. Ime datoteke može se upisati ili odabrati pritiskom na tipku Browse koja se nalazi na desnoj strani tekstualnog okvira. Datoteka s kontrolnim točkama koristi se samo kod aerotriangulacije. Pass Points Files - Opcija za unos imena datoteke koja sadrži kontrolne točke modela. Ime datoteke može se upisati ili odabrati pritiskom na tipku Browse koja se nalazi na desnoj strani tekstualnog okvira. Datoteka Pass Points sprema informacije o veznim točkama, koje su rezultat aerotriangulacije. Camera Calibration - Opcija za unos imena datoteke koja sadrži parametre kalibracije kamere. Preporuča se da korisnik nazove datoteku prema tipu kamere, npr. RC10.cmr. Za RMK kamere, ime datoteke mora počinjati se "RMK", npr. RMKtop.cmr. Ostali tipovi kamera mogu biti nazvani imenom po želji. Photo Scale - Opcija kojom se određuje mjerilo snimki. Total Strips - Zadaje broj nizova u jednom bloku. Sensor Type - Služi za odabir tipa senzora. VirtuoZo podržava sedam tipova: Metric - Snimke snimljene mjernim kamerama (kamerama sa rubnim markicama). Non Metric - Snimke dobivene nemjernim kamerama (bez preslikanih rubnih markica), npr. skenirane fotografije snimljene amaterskim kamerama. Satelite Images - Satelitske snimke. IKONOS - IKONOS satelitske snimke. QuickBird - QuickBird satelitske snimke. Metric Digital Camera - Snimke dobivene mjernim digitalnim kamerama. Rubne markice kod digitalnih mjernih snimki su četiri točke koje se nalaze u vrhovima snimke. Program automatski računa parametre unutarnje orijentacije na temelju te četiri točke. U ovom slučaju nije potrebno izvršiti unutarnju orijentaciju.
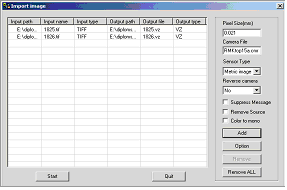
Slika 3. Dijaloški okvir za podešavanje parametara bloka Standardni parametri bloka (Default Block Parameters) zadaju se u donjem desnom dijelu prozora i koriste se u daljnjoj obradi podataka: DEM Spacing - Interval mreže DMV-a izražen u jedinicama koje odgovaraju jedinicama kontrolnih točaka. Contour Interval - Interval slojnica izražen u jedinicama koje odgovaraju jedinicama kontrolnih točaka. DEM Rotation (Disable/Enable) - DMV može biti kreiran u nekom koordinatnom sustavu koji je rotiran ili u referentnom koordinatnom sustavu. Ukoliko je odabrana opcija Disable, DMV će biti kreiran sa istom orijentacijom kao i referentni koordinatni sustav. Odabir opcije Enable upućuje da postoji određeni kut između orijentacije DMV-a i koordinatnog sustava kontrolnih točaka. Rotation Angle - Kut između koordinatnog sustava DMV-a i referentnog koordinatnog sustava. Ukoliko je odabrana opcija Enable u tekstualnom okviru Rotation Angle i upisana vrijednost "0", program će automatski izračunati kut između smjera leta i x-osi referentnog koordinatnog sustava, na temelju prve obrade DMV-a i automatski zamijeniti vrijednost u ovom polju. Orthoimage GSD (Ground Sampling Distance) - zemljišna rezolucija rezultirajuće ortofotoslike (u jedinicama koje odgovaraju jedinicama kontrolnih točaka). Vrijednost GSD odgovarajuća je izlaznom mjerilu (Output Scale). Promjenom vrijednosti GDS, automatski se mijenja vrijednost veličine piksela i vrijednost Printer DPI. Master Image - opcija za odabir lijeve ili desne snimke kao glavne za ortorektifikaciju. Nakon zadavanja parametara bloka, odabirom naredbe Save program automatski kreira blok <ime bloka>.blk. Prije kreiranja modela potrebno je izvršiti niz predradnji poput učitavanja snimki, podešavanja parametara kamere, podešavanja datoteke kontrolnih točaka i dr. Digitalna snimka može biti dobivena na dva načina: direktno - korištenjem digitalne kamere ili senzora ili indirektno - skeniranjem analognih snimki. Većina skeniranih snimki pohranjena je u TIFF formatu. VirtuoZo ne prihvaća snimke u ovakvom formatu, te je iste potrebno prevesti u interni VirtuoZo format .vz. Formati koje program prihvaća su TIFF, SGI(RGB), 24-bit BMP, nekomprimirani JPEG, TGA, SUN raster, VIT, JFIF/JPEG, Mr.Sid, NTF 2.0, itd. Odabirom naredbe File > Import > Image otvara se dijaloški okvir Import Image ( Slika 4) u kojem korisnik može definirati postavke poput veličine piksela (Pixel Size), ime datoteke kamere (Camera File), tip senzora (Senzor Type), i sl. Većina parametara zadanih u dijaloškom okviru je u skladu sa već zadanim parametrima bloka, te ih nije potrebno mijenjati. Ipak, potrebno je zadati veličinu piksela. Veličina piksela određena je parametrima prilikom skeniranja. Ukoliko se veličina piksela postavi na "-1", program će pročitati vrijednost veličine piksela pohranjene u datoteci i sam popuniti polje.
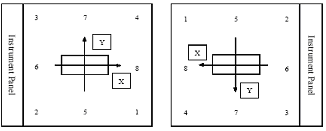
Slika 4. Dijaloški okvir za unos slika Ukoliko je uključen potvrdni okvir Remove Source, sve originalne snimke biti će obrisane nakon transformacije. Snimke koje želimo transformairati označimo, odaberemo naredbu Option i u dijaloškom okviru Modification odaberemo ime mape u koju će se spremati transformirane snimke. Hoćemo li odabrati opciju za okretanje kamere (Reverse Camera), ovisit će o položaju rubnih markica. Ako je okvir kamere okrenut za 180° u odnosu na snimku potrebno je okrenuti kameru ( Slika 5).
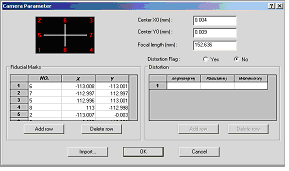
nije potrebno okrenuti potrebno okrenuti Slika 5. Razmještaj rubnih markica na snimci Klikom na tipku OK vraćamo se na dijaloški okvir Import Image i naredbom Start pokrećemo transformaciju snimki. Nakon što su snimke prevedene u .vz format, moguće je nastaviti sa radom u VirtuoZo-u. Za podešavanje parametara kamere odaberemo naredbu Camera Parameter u padajućem izborniku Setup. U dijaloškom okviru Camera Parameter ( Slika 6) u zadana polja unosimo X i Y koordinate glavne točke najbolje simetrije i žarišnu udaljenost u milimetrima. U odgovarajuću tablicu unesu se koordinate rubnih markica u milimetrima. Moguće je zadati i parametre distorzije: kut (u stupnjevima), radijus (u mm) i srednju vrijednost distorzije (u µm).
Slika 6 Dijaloški okvir za zadavanje parametara kamere
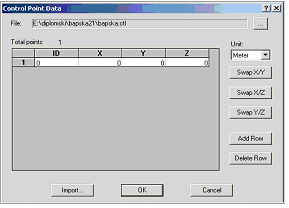
Snimke korištene u projektu Bapska-Gradac dobivene su mjernom aerofotogrametrijskom kamerom Zeiss RMK TOP 15. Podaci o kameri, potrebni za kreiranje datoteke kamere, pročitani su iz certifikata o kalibraciji kamere i unešeni u tekstualnu datoteku: 0.004000 0.009000 152.636000 6 -113.008000 -113.001000 7 -112.997000 112.997000 5 112.996000 113.001000 8 113.000000 -112.998000 2 -113.007000 -0.003000 3 -0.002000 112.999000 1 112.993000 0.002000 4 -0.008000 -113.006000 Primjer dokumenta RMKtop15.cmr sa podacima o kameri Datoteku u kojoj su zapisane koordinate kontrolnih točaka moguće je uređivati u dijaloškom okviru Ground Points odabirom naredbe Setup > Ground Points. Kontrolne točke moguće je direktno unijeti iz već kreirane datoteke ili ručno upisati ( Slika 7). Upisane vrijednosti moguće je brisati, nadopunjavati, mijenjati. Klikom na tipku OK spremamo promjene i izlazimo iz sučelja. Budući da program ne dopušta da kod zadavanja parametara bloka polje za unos imena datoteke koja sadrži kontrolne točke modela ostane nepopunjena, kreirana je prazna tekstualna datoteka bapska.ctl.
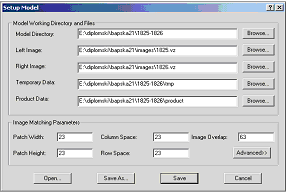
Slika 7. Prozor za unos koordinata kontrolnih točaka Svaki blok sastoji se od jedng ili više modela i za svaki model potrebno je definirati datoteku koja će sadržavati njegove postavke. Naredbom File > Open otvaramo postojeći ili kreiramo novi model. Model mora biti kreiran u odgovarajućem direktoriju, a ime modela mora se razlikovati od imena bloka. U suprotnome može doći do proturječnosti parametara. Odabirom naredbe Setup > Model Parameters ( Slika 8) otvara se dijaloški okvir Setup Model u kojem je moguće podesiti slijedeće parametre: Model Directory - Odabir imena direktorija u kojem će biti spremljen model. Left Image i Right Image - Odabir lijeve, odnosno desne snimke stereopara. Temporary Data - Direktorij u koji se spremaju privremene datoteke. Product Data - Direktorij u koji se spremaju podaci o produktima.
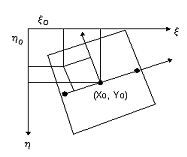
Slika 8. Dijaloški okvir za unos parametara modela Nakon što su parametri modela zadani, odabirom naredbe Save program će spremiti model kao <ime modela>.mdl a parametre modela u direktorij <ime direktorija bloka\ ime direktorija modela\ ime modela.dat>. 3.4. Orijentiranje modela3.4.1. Unutarnja orijentacijaMjerna snimka definirana je kao egzaktna centralna projekcija u kojoj se centar projekcije nalazi na razmaku c od glavne točke snimke. Parametri ovog pojednostavljenoga, matematičko-geometrijskog modela, konstanta kamere c i slikovne koordinate glavne točke snimke H ( ξ 0, η 0) označeni su kao elementi unutarnje orijentacije. Ovo idealizirano predstavljanje ne odgovara stvarnom stanju. Kod većih se zahtjeva točnosti moraju uzeti u obzir neizbježne pogreške optike, mehanike kamere, a također i fotografije (Kraus 2006). Unutarnja orijentacija rekonstruira se transformacijom izmjerenih slikovnih koordinata rubnih markica na kalibrirane vrijednosti iz kalibracijskog protokola. Na taj način eliminiraju se pravilne deformacije i usuh. Dodatno se uzimaju u obzir i podaci o radijalnoj distorziji i također se uklone (Kraus 2006). Certifikat kalibracije fotogrametrijske mjerne kamere sadrži informacije o slikovnim koordinatama svih rubnih markica i udaljnosti između markica (uzduž osi i dijagonalno), koordinate glavne točke autokolimacije PPA, glavne točke najbolje simetrije PBS i srednje točke snimke FC u istom koordinatnom sustavu, konstantu kamere c, srednju krivulju radijalne distorzije, datum kalibriranja i podatke o oštrini snimke. Zadatak unutarnje orijentacije je uspostaviti vezu između pozicije (položaja) piksela i slikovnog koordinatnog sustava ξ, η ( Slika 9).
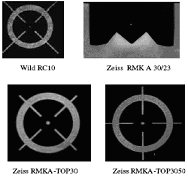
Slika 9. Veza između pozicije piksela i slikovnog koordinatnog sustava Tako je u digitalnoj fotogrametriji tradicionalno mjerenje slikovnih koordinata zamijenjeno identifikacijom piksela. Kod digitalnih kamera odnos između pozicije piksela i slikovnih koordinata je gotovo konstantan. Taj odnos određuje se u postupku kalibracije. Kod skeniranih snimki, isti odnos određuje se mjerenjem slikovnih koordinata rubnih markica. Rubne markce uglavom su pravilnih oblika, te predstavljaju umjetne objekte na snimkama. Rubne markice preslikavaju se na film za vrijeme ekspozicije. Različiti tipovi kamere mogu imati različite oblike rubnih markica ( Slika 10). Rubne markice smještene su u rubovima i/ili na sredini stranica okvira kamere.
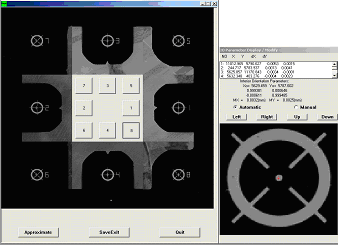
Slika 10. Primjeri različitih oblika rubnih markica Odabirom naredbe Process > Model Orietation > Interior u glavnom izborniku otvara se sučelje za kreiranje maske kamere ( Slika 11).
Slika 11. Sučelje za kreiranje maske kamere U glavnom prozoru prikazana je lijeva snimka modela na kojoj su rubne markice uokvirene bijelim okvirima. Desni prozor prikazuje uvećanu sliku uokvirene rubne markice. Ukoliko bijeli pravokutnik ne uokviruje rubnu markicu, potrebno je pomaknuti pokazivač na markicu i kliknuti. Rubna markica biti će automatski uokvirena bijelim okvirom. Nakon što su svi okviri podešeni tako da uokviruju rubne markice, kliknemo na tipku Accept i program će automatski pokrenuti unutarnju orijenatciju. Pojavit će se sučelje za unutarnju orijentaciju ( Slika 12) u kojem korisnik može fino podesiti rubne markice. Za postizanje tražene točnosti unatarnje orijentacije, potrebno je podesiti bijeli križić točno u središte rubne markice.
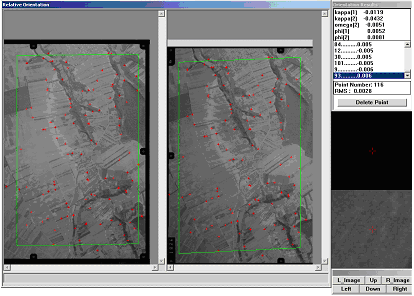
Slika 12. Sučelje za unutarnju orijentaciju Klikom na naredbu SaveExit snimamo promjene i izlazimo iz sučelja. Za desnu snimku ponovimo postupak. Postupak unutarnje orijentacije u VirtuoZo-u moguće je izvršiti sa potpiksel točnošću. Ugrubo, treba se voditi za tim da vrijednosti "MX" i "MY" budu oko 1/2 do 1/3 rezolucije piksela. Ukoliko ove vrijednosti premašuju rezoluciju skeniranja, potrebno je provjeriti parametre kalibracije kamere, koristimo li ispravnu datoteku kalibracije kamere, te jesu li sve rubne markice ispravno odabrane. 3.4.2. Vanjska orijentacijaTradicionalni pristup određivanja dvanaest nepoznanica orijentacije provodi se u dva koraka: najprije se izvrši relativna, a zatim apsolutna orijentacija. Relativnom orijentacijom, na osnovi uvjeta komplanarnosti ili jednadžbi kolinearnosti, određuje se pet nepoznatih parametara, a kao rezultat dobivamo trodimenzionalni stereoskopski model oslobođen vertikalne paralakse. Kod klasičnog pristupa, potrebno je opažati najmanje pet homolognih točaka (veznih točaka) u području preklopa na obje snimke. Uobičajeni postupak je opažanje šest povoljno raspoređenih točaka, poznatih kao Gruberove točke, koji je osmišljen za analogne instrumente (Kraus 2006). Opsežna istraživanja o automatizaciji relativne orijentacije provedena su u kasnim 1980-ima i nastavila se u 1990-ima. Razvijena su općenita rješenja neovisna o aproksimaciji mjerila i rotacijama snimki, poput relacijskog usklađivanja ili rotacijski neovisnog usklađivanja zasnovanog na osobinama tekstura. Zbog kompliciranih algoritama i vremenski zahtjevnog računanja samo je par rješenja implementirano u module za automatsku relativnu orijentaciju i njih danas susrećemo u standardnim paketima fotogrametrijskih programa (Potučkova 2004). Razlike u faktoru mjerila i rotacijama na aerosnimkama jednog stereopara ili jednog niza su malene, a njihove približne vrijednosti su poznate. Ovo svojstvo olakšava nam pronalaženje interesnih točaka duž približnih epipolarnih linija što zajedno sa hijerarhijskim pristupom (slikovne piramide) i robusnim izjednačenjem čini rješenje većine programa za automatsku orijentaciju. Na ovaj način može se postići točnost između 0.2 i 0.4 piksela (Heipke 1997). U usporedbi sa manualnim mjerenjem, automatizirani pristup koristi veći broj veznih točaka (sto i više po jednom stereoparu). Ipak, vezne točke moraju biti povoljno raspoređene na područjima preklopa. Preostalih sedam nepoznanica određuje se apsolutnom orijentacijom. Ona predstavlja trodimenzionalnu konformnu transformaciju proizvoljnog sustava modela u objektni koordinatni sustav. Zemljišne koordinate kontrolnih točaka, koje su mjerene i na objektu i na snimkama koriste se kao identične točke za ovu transformaciju. Automatsko mjerenje kontrolnih točaka je složen zadatak i neko opće rješenje još nije nađeno (Potučkova 2004). U projektu Bapska-Gradac postupak vanjske orijentacije neće biti izvršen na ranije opisan (klasični) način. Budući da nam koordinate kontrolnih (orijentacijskih) točaka u referentnom koordinatnom sustavu nisu poznate, orijentacija modela izvršit će se direktnim unosom parametara vanjske orijentacije. Parametri vanjske orijentacije za svaku od snimki (koordinate projekcijskih središta i rotacijska matrica) dobiveni su metodom izjednačenja zrakovnog snopa u postupku aerotriangulacije bloka. Navedeni parametri nalaze se u Izvješću o aerotriangulaciji koje je izradio Zavod za fotogrametriju d.d. Zagreb prema narudžbi Državne geodetske uprave. Relativna orijentacija Unatoč tome, što će elementi vanjske orijentacije biti direktno unešeni, program zahtijeva da se izvrši relativna orijentacija. Odabirom naredbe Process > Model Orientation > Relative u glavnom izborniku, program automatski učitava lijevu i desnu snimku modela i otvara sučelje za relativnu orijentaciju ( Slika 13).
Slika 13. Sučelje za relativnu orijentaciju
Naredbom Save spremamo rezultate relativne orijentacije, naredbom Exit izlazimo iz sučelja za orijentaciju, a program automatski sprema rezultate orijentacije u datoteku <ime stereopara>.rop. Unos parametara vanjske orijentacije Za orijentiranje modela na osnovi unešenih parametara potrebno je sastaviti tekstualnu datoteku koja sadrži: identifikacijski broj snimki, prostorne koordinate projekcijskog središta (X,Y,Z) i elemente r ik prostorne rotacijske matrice R za pojedinu snimku. 1825 6598351.41949 5004057.45138 3168.39264 -0.999184648561 -0.039655188209 -0.007583147672 0.039824780434 -0.998925545844 -0.023701070083 -0.006635129533 -0.023983742573 0.999690329626 1826 6600065.15265 5004009.57591 3171.68896 -0.997421987722 -0.070956606658 -0.010702260513 0.071146647107 -0.997293064890 -0.018566026181 -0.009355907971 -0.019279592690 0.999770355778 Primjer dokumenta sa parametrima vanjske orijentacije
Prostorna rotacijska matrica R ima ovaj oblik:
Elemente r ik prostorne rotacijske matrice R možemo interpretirati na tri različita načina, tj. kao (Kraus 2006):
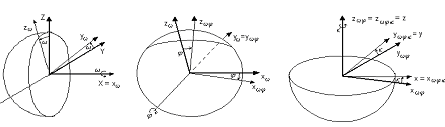
Rotacija u prostoru definirana je pomoću tri nezavisna parametra. U fotogrametriji ove parametre često definiramo kao kutove rotacije ω, φ, κ oko tri koordinatne osi. Pri tome se mora imati na umu redoslijed rotacija. Proizvoljno rotirani sustav moguće je promatrati kao krajnji produkt triju zasebnih rotacija ω, φ, κ, kako je prikazano na Slici 14. Svaka je rotacija u smjeru obrnutom od kretanja kazaljke na satu gledajući duž odgovarajuće osi ka koordinatnom središtu (Kraus 2006).
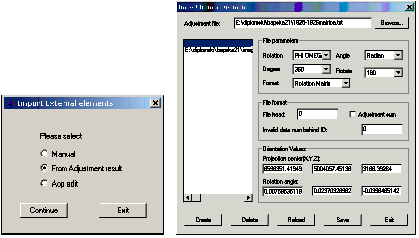
Slika 14. Niz od tri rotacije koordinatnog sustava (Kraus 2006) Nakon što su podaci pripremljeni, možemo izvršiti unos parametara vanjske orijentacije u VirtuoZo. Odabirom naredbe File > Import > Control u glavnom izborniku otvara se dijaloški okvir za unos elemenata vanjske orijentacije Import External Elements u kojem se odabere opcija From Adjustment Result ( Slika 15), što znači da su podaci koje unosimo zapravo rezultati izjednačenja. Pojavi se prozor Import from adjustment u kojem je potrebno zadati ime datoteke koja sadrži parametre vanjske orijentacije, te postaviti odgovarajuće parametre i format datoteke.
Slika 15. Dijaloški okvir i prozor za unos elemenata vanjske orijentacije
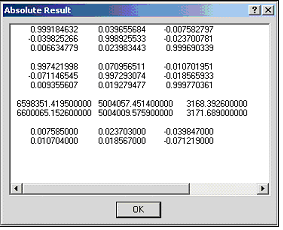
Nakon što su podešene postavke, odaberemo naredbu Save i program automatski uvodi i sprema zadane orijentacijske parametre. U glavnom izborniku VirtuoZo-a odaberemo naredbu Process > Model Orientation > Absolute i pojavi se prozor sa vrijednostima apsolutne orijentacije i izračunatim kutevima rotacije ( Slika 16).
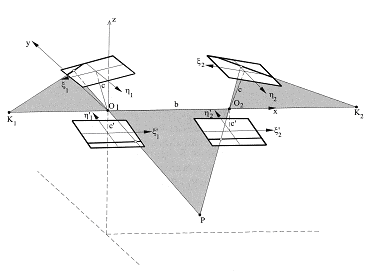
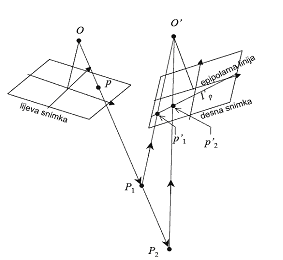
Slika 16. Definitivni elementi vanjske orijentacije za svaku snimku (devet elemenata rotacijske matrice, koordinate projekcijskog središta i izračuanti kutevi rotacije ω,φ,κ ) Rezultate orijentacije program automatski sprema u datoteku <ime lijeve snimke>.aop, <ime desne snimke>.aop i <ime stereopara>.aop. 3.5. Epipolarno preuzorkovanjeNakon što su određeni orijentacijski elementi stereopara, bilo za relativnu ili potpunu apsolutnu orijentaciju, postoje uvjeti za stvaranje normalne (prave) projekcije (normaliziranih slika) (engl. epipolar resampling). Epipolarni format je zapravo preraspored piksela u svakoj od digitalnih slika stereomodela na način da se ukloni vertikalparalaksa. Rezultirajuće slike, nakon ovog postupka, biti će spremne za prikupljanje trodimenzionalnih objekata i podataka za DMR u stereoskopskom načinu rada (Morgan 2004). Prevođenje stereomodela u epipolarni format traje oko 15 minuta za snimke rezolucije 21 µm. Rezultat je datoteka veličine približno 60% (pretpostavka je da je uzdužni preklop između snimki 60%) veličine originalne skenirane snimke. Normalizirane digitalne snimke imaju važnu ulogu u digitalnoj fotogrametriji, jer primjenjuju isti izvorni element kao i ljudsko oko. Zato "kompjutorski pogled" treba oponašati ljudski. Dvije normalizirane slike prikazuju horizontalne paralakse ( ξ-paralakse), a ne vertikalne ( η-paralakse). Korelacijski zadatak zato je sada samo jednodimenzionalan, budući da izvorne točke imaju iste koordinate η (Kraus 2006) što znatno ubrzava postupak korelacije. Kod normaliziranih snimki, olakšano je pronalaženje objekata koji se podudaraju na oba snimka, a to dovodi do smanjivanja prostora traženja, kao i smanjenog vremena usklađivanja kod pojave dvoznačnih rješenja. 3.5.1. Stvaranje normaliziranih slika u programu VirtuoZoStvaranje normaliziranih slika u programu VirtuoZo je računalno zahtjevan postupak, ali se provodi automatski i bez nadzora. Nakon izvršene relativne orijentacije moguće je iz odabranih digitalnih slika dobiti nehorizontalne normalizirane slike. Stvaranje horizontalnih normaliziranih slika moguće je izvršiti nakon obavljene apsolutne orijentacije. Najprije je potrebno definirati radno područje (engl. working area). Za označavanje radnog područja potrebno je ući u sučelje za relativnu orijentaciju. Klikom na desnu tipku miša u glavnom prozoru snimke otvara se izbornik u kojem se odabire naredba Define Area. Radno područje označi se pravokutnikom držeći lijevu tipku miša. Drugi način je odabrati opciju Find Maximum Area u padajućem izborniku i program će automatski kreirati maksimalni domet radnog područja. Nakon što je radno područje definirano, moguće je generirati normalizirane slike. Odabere se naredba Process > Epipolar Resampling > Normal Epipolar u glavnom izborniku, i program će automatski generirati normaliziranu sliku za odabrani model. 3.5.2. Geometrija epipolarnih zrakaEpipolarna zraka oblikovana je presjekom slikovne ravnine i epipolarne ravnine, koja prolazi kroz dva projekcijska središta O 1 i O 2 i objektnu točku P ( Slika 17). Sve epipolarne zrake iste slike sijeku se u epipolarnoj točki K, koja se dobije presjekom pravih linija koje prolaze kroz dva projekcijska središta slikovne ravnine. Zato je epipolarna točka slika drugog projekcijskog središta. (Epipolarna točka normalizirane slike leži u beskonačnosti.) (Kraus, 2006).
Slika 17. Originalne (izvorne) i normalizirane slike, s epipolarnim točkama i epipolarnim zrakama (Kraus 2006) Homologne točke na lijevom i desnom snimku nalaze se na pripadnim nuklearnim zrakama ( Slika 18), gdje je: I'p nuklearna zraka na desnoj snimci točke P na lijevoj snimci p 1' i p 2' dvije različite točke na desnoj snimci koje leže na nuklearnoj zraci I'p
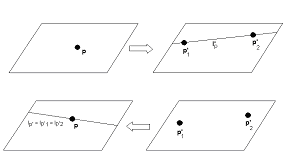
Slika 18. Parovi epipolarnih linija (Morgan 2004) Nuklearne zrake točaka p 1' i p 2' (I'p 1 i I'p 2) su identične i prolaze kroz točku p. Sukladno tome, nuklearna zraka bilo koje točke, različite od točaka p 1' i p 2', koja leži na I'p identična je sa Ip' i prolazi kroz točku p. To se vidi na Slici 17, budući da sve ove točke i zrake leže u istoj ravnini (nuklearnoj ravnini). 3.5.3. Određivanje nuklearnih zraka kod mjernih snimkiNuklearne zrake kod mjernih snimki moguće je odrediti na dva načina. Oba načina oslanjaju se na poznavanje parametara unutarnje orijentacije ili poznavanje parametara relativne orijentacije za obje mjerne snimke (Morgan 2004). Metoda 1: Jednadžbe kolinearnosti u prostoru objekta Jednadžbe kolinearnosti (Kraus 1993) (formula 5.1) daju odnos između koordinata X,Y,Z objektne točke P i slikovnih koordinata P' na snimci ( Slika 19).
Slika 19. Određivanje epipolarne linije obrnutim projiciranjem točaka (Morgan 2004)
gdje su: x, y slikovne koordinate promatrane točke na lijevoj snimci za koje se određuje nuklearna zraka na desnoj snimci x 0, y 0, c parametri unutarnje orijentacije mjerne kamere x 0, y 0, z 0, ω, φ, κ elementi vanjske orijentacije za lijevu snimku x j, y j, z j koordinate u dvo- ili trodimenzionalnom objektnom koordinatnom sustavu λ j faktor mjerila R ( ω, ϕ, κ) rotacijska matrica (formula 5.2)
Parametri r ik su elementi matrice rotacije R koja u ovom slučaju opisuje prostorni položaj snimke u odnosu na koordinatni sustav (X,Y,Z) (Kraus 2006). Jednadžbe 5.1 pokazuju da za tri jednadžbe postoje četiri nepoznanice. Nepoznanice su objektne koordinate i faktor mjerila. Prisjetimo se da DMR ili prava visina točke objekta nisu traženi. Lijeva nuklearna zraka može se odrediti na osnovu orijentacijskih parametara. Dvije različite točke odabrane su duž zrake, izborom dva različita faktora mjerila ( λ 1, λ 2) te rješavanjem jednadžbi 5.1 pojedinačno za točku (X 1,Y 1,Z 1) i točku (X 2,Y 2,Z 2). Valjane vrijednosti za λ 1 i λ 2 odabiru se na način da objektne točke predstavljaju minimalnu i maksimalnu visinu u objektnom prostoru. Dvije objektne točke zatim se reprojiciraju na desnu snimku čije orijentacijske parametre poznajemo, a pripadajuće koordinate (X' j,Y' j) desne snimke dobijemo rješavanjem jednadžbi za X:
gdje su: X' 0, Y' 0, Z' 0, ω', φ', κ' parametri vanjske orijentacije desne snimke R' ( ω, φ, κ) rotacijska matrica
Metoda 2: Uvjet komplanarnosti izvan prostora objekta Uvjet komplanarnosti (jednadžba 5.5) može se direktno koristiti za određivanje jednadžbe nuklearne zrake:
gdje je:
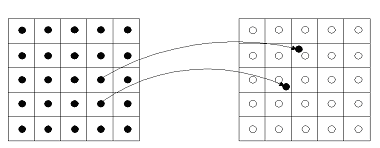
×, ◦ simboli za vektorski produkt Budući da su nepoznate samo koordinate odgovarajuće točke desne snimke (X',Y'), jednadžba (5.5) postaje jednadžba nuklearne zrake. Važno je primjetiti da nuklearne ravnine kroz različite točke općenito nisu paralelne. Iznimka je slučaj kada su snimke paralelne sa zračnom bazom. To je očito, budući da se sve nuklearne zrake sijeku u nuklearnim čvorovima, a čvorovi su u beskonačnosti, pa će stoga i nuklearne zrake biti paralelne. Ovo razmatranje koristi se kod ponovnog uzorkovanja (engl. resampling) snimki za dobivanje normaliziranih slika, a naziva se epipolarno preuzorkovanje (engl. epipolar resampling). 3.5.4. Epipolarno preuzorkovanje i stvaranje normaliziranih slikaGlavni cilj epipolarnog preuzorkovanja je stvaranje normaliziranih slika, koje imaju (prirođeno) svojstvo da korespodentne točke leže u istim redovima (ili stupcima). Prednost je u tome što se kod normaliziranih slika smanjuje prostor pretraživanja i vrijeme računanja, te mogućnost dvoznačnog usklađivanja. Ovo je važno kod širokog kruga primjene, kao npr.: automatskog usklađivanja, automatske relativne orijentacije, automatske aerotriangulacije, automatskog generiranje DMR-a, izrade ortofota i stereoskopskog pogleda. Slika 20. pokazuje normalizirane stereo snimke, pri čemu točka a na lijevoj snimci ima koordinate (x a,y a). Kod normaliziranih slika, prostor pretraživanja za njezinu homolognu a' na desnoj snimci imati će istu vrijednost y', kao i za a. Dakle, y' a = y a. Isto vrijedi i za točku b. Kod digitalnih slika, prostor pretraživanja za homolognu točku biti će redak u drugoj slici.
Lijeva normalizirana slika Desna normalizirana slika Slika 20. Normalizirani stereopar 3.5.5. Koncept dobivanja normaliziranih slika od odabranih digitalnih slikaKrećemo od pretpostavke da je već izvršena relativna orijentacija. ξ 1, η 1 i ξ 2, η 2 su slikovne koordinate izvornih slika; ξ 1', η 1' i ξ 2', η 2' su slikovne koordinate odgovarajućih normaliziranih slika (vidi Sliku 17). Konstantna dužina normaliziranih slika je c'. Izvor (lokalnoga) predmetnog koordinatnog sustava leži u projekcijskom središtu O 1 i os X prolazi kroz projekcijsko središte O 2. Os z okomita je na prvu normaliziranu sliku, npr. ω 1=φ 1=κ 1=0. Os y okomita je na ravninu xz (Kraus, 2006). Matematički odnos između slikovnih koordinata ξ i η jedne od originalnih (izvornih) i slikovnih kooordinata ξ' i η' odgovarajuće normalizirane slike može se izvesti iz kolinearnih uvjeta:
(5.6)
U obzir je uzet poseban položaj predmetnog koordinatnog sustava:
Tada imamo:
(5.7)
Rješenje jednadžbe (5.7) za slikovne koordinate ξ' i η' glasi:
(5.8)
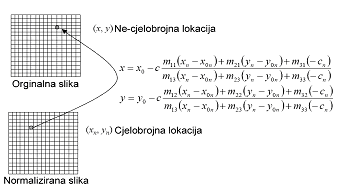
gdje su r ik elementi prostorne rotacijske matrice R dobiveni rotacijama iz elemenata relativne orijentacije. 3.5.6. Provedba postupka stvaranja normaliziranih slikaPostupak za epipolarno preuzorkovanje i dobivanje normaliziranih slika može se sažeti ovako ( Slika 21) (Morgan 2004):
Slika 21. Postupak dobivanja normaliziranih slika (Morgan 2004) 1. Počinjemo od bilo koje lokacije piksela u normaliziranoj slici (x n,y n). 2. Računamo pripadajuću lokaciju u originalnoj slici (x,y) koristeći jednadžbe.
gdje je:
Vrijednosti za x i y obično nisu cijeli brojevi. 3. Računamo sivu tonsku vrijednost g(x,y) u originalnoj slici koristeći odgovarajuću metodu interpolacije poput metode najbližeg susjeda, bilinearne interpolacije ili kubične konvolucije. 4. Pridodamo interpoliranu sivu tonsku vrijednost pikselu normalizirane slike, tj.: g(x n,y n) = g(x,y). 5. Ponovimo navedene postupke za sve piksele normalizirane slike. 6. Ponovimo navedene korake za drugu snimku stereopara. 3.6. Usklađivanje snimkiOdređivanje homolognih točaka na dvije ili više snimki jedan je od najčešćih zadataka u fotogrametriji. Određivanje homolognih točaka dio je postupaka kao što su relativna i apsolutna orijentacija stereoparova, aerotriangulacija ili generiranje DMR-a. Dok je u analognoj i analitičkoj produkciji operator taj koji manualno mjeri točke, u digitalnim sustavima predviđeno je da se ovi zadaci rješavaju automatski. U literaturi, proces automatskog traženja podudarnih entiteta na nekoliko snimki označava se kao usklađivanje snimki (engl. image matching) ili problem podudarnosti (engl. correspodence problem) (Schenk 1999). U fotogrametriji i daljinskim istraživanjima, usklađivanje (engl. matching) može se definirati kao uspostava podudarnosti među različitim setovima podataka (Potučkova 2004). Problem usklađivanja također se veže uz problem podudarnosti. Setovi podataka zapravo predstavljaju snimke, karte, ili objektne modele i GIS podatke. Mnogi koraci u lancu fotogrametrijskih procesa, na ovaj ili onaj način, povezani su sa usklađivanjem, npr.: - rekonstrukcija unutarnje orijentacije: slika rubne markice usklađuje se sa dvodimenzionalnim modelom rubnih markica. - relativna orijentacija i prijenos podataka u postupku aerotriangulacije: dijelovi jedne snimke usklađuju se sa dijelovima druge, kako bi stvorili vezne točke. - apsolutna orijentacija: dijelovi snimke usklađuju se sa opisom kontrolnih objekata, većinom referentnih kontrolnih točaka. - generiranje DMR-a: dijelovi jedne snimke usklađuju se sa dijelovima druge kako bi dobili trodimenzionalne koordinate objekta. - u postupcima interpretacije: dijelovi snimke usklađuju se sa modelom objekata kako bi se identificirali i lokalizirali iscrtane scene objekata. U usporedbi sa manualnim mjerenjima, automatske metode su brže (pogotovo kad se primjenjuju kod aerotriangulacije blokova koji se sastoje od velikog broja snimki), a postignuta točnost obično je veća ili najmanje jednaka u usporedbi sa točnosti koja se postiže na analitičkim instrumentima. S druge strane, zbog velikog broja pogrešaka (engl. mismatches) koje se obično javljaju, veliki broj opažanja (princip redudancije) i implementirane tehnologije za detekciju i eliminiranje pogrešaka (engl. outlier) imaju veliku važnost u postizanju visoke točnosti (Ackerman 1996.). Usklađivanje snimki obično se vrši u prostoru snimki. Koncept usklađivanja u objektnom prostoru također je razvijen, ali još nije našao praktičnu primjenu. Puno istraživanja je napravljeno s ciljem automatskog pronalaženja veznih točaka, točaka koje povezuju dvije preklapajuće snimke (stereopar) ili povezuju snimke u blok. Traženje homolognih točaka može se izvršiti u dvije dimenzije, npr. u pravokutniku orijentiranom duž približne epipolarne zrake u slučaju relativne orijentacije stereopara. U slučaju kada su nam poznati orijentacijski parametri, traženje može biti ograničeno na jednu dimenziju, tj. direktno na epipolarnu zraku, kao što se radi kod izmjere DMR-a. Ključna točka kod usklađivanja snimki je izbor entiteta za usklađivanje (engl. matching entity) (jednostavan element koji uspoređujemo sa jednostavnim elementom na drugoj snimci) i mjera sličnosti (brojčana mjera kojom se vrednuje usklađivanje entiteta). Usklađivanje "piksel po piksel" na cijelom području preklopa predstavlja veliku količinu računanja. Također dovodi i do nejasnosti zbog ponavljanja sivih vrijednosti i zbog šuma na snimkama. Općenito, usklađivanje snimki svrstava se u skupinu "ill-posed" problema. Ono ne zadovoljava kriterije postojećeg, jedinstvenog rješenja koje je stabilno i s malim varijacijama u odnosu na unesene podatke. Da bi promjenili usklađivanje snimki u "well-posed" problem, moramo odrediti entitete za usklađivanje, mjeru sličnosti, geometrijska ograničenja i pretpostavke, kako bi se ograničio prostor za sva moguća rješenja (Potučkova 2004). U Tablici 1. dan je pregled tri osnovne metode usklađivanja snimki koje su razvijene i koriste se u fotogrametriji i "kompjuterskom pogledu". Tablica 1. Metode usklađivanja snimki
3.6.1. Plošne metode usklađivanjaEntiteti za usklađivanje kod ove metode su sive tonske vrijednosti. Usklađivanje samo jednog piksela dovodi do problema dvoznačnih rješenja. Zato koristimo sive tonske vrijednosti nekoliko susjednih piksela. Geometrijski oblik uzorka sadržan je u referentnoj slici, koja se još naziva i referentna matrica, odnosno matrica uzorka (engl. template). Matrica uzorka sastoji se od m×n piksela, obično vrijedi m=n. Pozicija uzorka odnosi se na centralni piksel, zato su m i n neparni brojevi. Uzorak se uspoređuje sa prozorima iste veličine u drugoj snimci. Moguće je odrediti približnu poziciju korespodentne točke na drugoj snimci (npr. kada su poznati približni orijentacijski elementi stereopara). Uspoređivanje se tada svodi na područje koje se naziva područje pretraživanja (engl. search area). Vrijednost mjere sličnosti računa se za svaku poziciju uzorka u području pretraživanja. Ovisno o karakteru mjere sličnosti, pretpostavlja se da se točka korespodentna centru uzorka nalazi u poziciji gdje je dobivena maksimalna ili minimalna mjera sličnosti. U fotogrametriji, unakrsna korelacija (engl. cross-corelation) i korelacija po metodi namanjih kvadrata (engl. least square matching) najčešće se upotrebljavaju od plošnih metoda usklađivanja. Ovisno o odabiru vrijednosti za mjeru sličnosti, moraju se uzeti u obzir slijedeći faktori:
Što je veći uzorak, potrebno je zadovoljiti više zahtjeva za jedinstvenost entiteta za usklađivanje. S druge strane, geometrijska distorzija uzrokovana reljefom i različitim orijentacijama snimki utjecati će na usklađivanje kod velikih uzoraka. Velike vodene površine i pustinjska područja su tipični primjeri kada tehnike usklađivanja ne vrijede, također i područja prekrivena visokim objektima. Da bi dobili prihvatljive rezultate, veličina uzorka mora biti mala ili njegov oblik mora biti prilagođen geometrijskoj distorziji (npr. trapezoidni prozor).
Da bi izbjegli pogreške (engl. mismatches), pozicija prozora za pretraživanje kod plošnih metoda mora biti određena dosta točno. U ove svrhe primjenjuje se aproksimacija izračunatih parametara (npr. orijentacijski parametri, DMR) i hijerarhijski višestupanjski pristup (piramida slika). Kada radimo sa stereoparovima mogu se primjeniti dodatna geometrijska ograničenja, poput epipolarnih zraka. Da bi usklađivanje duž epipolarne zrake bilo lakše, snimke su pretvorene u tzv. normalizirane slike, tj. sve epipolarne zrake u snimkama su paralelne. Veličina prozora pretraživanja ovisi o tome koliko precizno je on lociran, te o geometrijskim deformacijama zbog reljefa i orijentacije snimki.
Jedna od mogućnosti za izbjegavanje pogrešnih usklađivanja je postavljanje karakterističnih vrijednosti praga (engl. threshold values). Granične vrijednosti praga rijetko vrijede za sve slučajeve. U odnosu na pragove mjere sličnosti, geometrijska ograničenja ili tehnike robustnog izjednačenja koriste se u daljnjim računanjima kako bi isključili lažna usklađivanja. Korelacija Mjera korelacije je korelacijski koeficijent r koji se računa iz standardne devijacije σ 1 i σ 2 gustoće g 1 i g 2 u obje površine i kovarijance σ 12 između gustoće u obje površine, kao što slijedi (Kraus 2006):
r koeficijent korelacije σ 1, σ 2 standardne devijacije sivih tonskih vrijednosti σ 12 kovarijanca sive tonske vrijednosti g 1, g 2 sive vrijednosti g 1', g 2' srednja siva tonska vrijednost R, C broj redaka i supaca Ako matricu uzorka i prozore za pretraživanje prikažemo pomoću vektora v T, v S koji se sastoje od 1×RC sivih tonskih vrijednosti reduciranih na srednje vrijednosti g 1', g 2', koeficijent korelacije može se interpolirati kao r=cosθ, gdje je θ kut između vektora ( Slika 22).
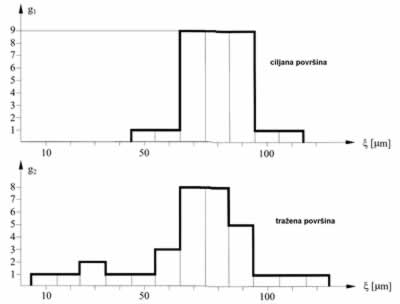
r = cos Q= v t v s / ( |v t | • |v s |) Slika 22. Geometrijska interpretacija koeficijenta korelacije Koeficijent korelacije može poprimiti vrijednosti u rasponu od -1≤r≤1. Vrijednost 1 postiže se samo ako su prozori za pretraživanje g T i g S povezani linearnom relacijom g T=r Tg S+r T, r S>0 , gdje r S predstavlja faktor mjerila, a r T pomak između sivih vrijednosti u g T i g S. Visoki koeficijent korelacije (blizak 1) predstavlja veliku vjerojatnost da je traženi uzorak prepoznat i pronađen. Vrijednosti blizu 0 upućuju da nema sličnosti, a vrijednost -1 dobije se kada su usklađeni pozitiv i negativ snimke. Prema tome, kod procesa usklađivanja snimki zahtijevaju se vrijednosti blizu 1. Uzorak se pomiče piksel po piksel duž prozora za pretraživanje, a koeficijent korelacije računa se za svaku poziciju uzorka. Pozicija na kojoj koeficijent korelacije dostiže svoju najveću vrijednost, uzima se kao najbolje podudarajuća pozicija. Koeficijent korelacije sam po sebi ne daje informaciju o točnosti pronađene pozicije najboljeg podudaranja. Pouzdanost neke pozicije najboljeg podudaranja ovisi o radiometrijskim svojstvima prozora koji varira s obzirom na drugačije osvjetljenje i kut pogleda, vremenske promjene ili projekciju usklađivane snimke. Tip terena igra također važnu ulogu. Autokorelacija se može koristiti u iste svrhe. U automatiziranim postupcima primjenjuju se interest operatori ili operatori za rubno izdvajanje. Kod ovakvih usklađivanja prihvaćaju se samo oni rezulatati kod kojih maksimalni koeficijent korelacije nadmaši zadanu vrijednost praga. U procesima kod kojih su objekti koje mjerimo dobro definirani (poput rubnih markica ili umjetno signaliziranih meta), pragovi su uspješna metoda za eliminiranje, ili u najmanju ruku, reduciranje pogrešnih usklađivanja (Potučkova 2004). Korelacija po metodi najmanjih kvadrata Koeficijent korelacije nije idealna mjera sličnosti između dva slikovna prozora s obzirom na njihove geometrijske i radiometrijske razlike. Početkom 1980-ih počeo je razvoj metoda koje postižu više od uzajamne korelacije, poput usklađivanja u potpiksel rangu, uključujući procjenu njihove točnosti. Između ostalih, istražuje se i korelacija po metodi najmanjih kvadrata. Ona nalazi primjenu i u terestričkoj i aerofotogrametriji i ugrađuje se u mnoge programske pakete. Ideja korelacije po metodi namanjih kvadrata je u minimiziranju razlika u sivoj tonskoj vrijednosti između uzoraka i pretraživanih slikovnih prozora u procesu izjednačenja gdje su određene geometrijske i radiometrijske korekcije prozora za usklađivanje (Schenk 1999). Važan uvijet za uspješnu korelaciju po metodi najmanjih kvadrata je da se relativno točno odredi položaj tražene površine, npr. unutar par piksela. Za tu svrhu može se koristiti unakrsna korelacija. Počinjemo s pretpostavkom da je približni položaj nađen unakrsnom korelacijom. Ako prikažemo približni položaj u traženoj površini zajedno s ciljanom površinom u istom koordinatnom sustavu, u ovom slučaju koordinate ξ kao na Slici 23., vidimo da ciljana površina mora biti pomaknuta za mali iznos (obično za manje od jednog piksela) relativno u odnosu na traženu točnost.
Slika 23. Ciljanja i tražena površina nakon približnog određivanja položaja (Kraus 2006) Označimo ovo malo pomicanje sa "a". Položaji dvaju kompleta gustoća onda su usklađeni s ovom relacijom: g 2( ξ)=g 1( ξ+a) (6.2) Ciljana i tražena površina ne razlikuju se samo svojim položajem (za mali iznos) nego se razlikuju i po svojoj gustoći. S jedne strane pridružujemo slučajne komponente "v" gustoćama g, a s druge strane sustavne popravke gustoćama g 1: v + g 2( ξ)=b * g 1( ξ+a) +c (6.3) Zbroj kvadrata slučajnih komponenti "v" minimiziran je metodom najmanjih kvadrata gdje su nam nepoznanice a, b i c utvrđene. U ovu svrhu prvo moramo linearizirati jednakost (6.3). Nakon sortiranja uvjeta konačno imamo jednadžbu željenih opažanja s tri nepoznanice a, b i c za izjednačenja posrednih mjerenja: v = g 1'( ξ)*a + g 1( ξ)*b + c – g 2( ξ) (6.4) g 1( ξ), g 2( ξ) su odgovarajuće gustoće u dvije površine; broj parova je, u općenitom smislu, definiran veličinom ciljane površine g 1'( ξ) je nagib gustoće profila prve površine u pojedinačnom položaju piksela (Kraus 2006). 3.6.2. Korelacija zasnovana na osobinama teksturaZa razliku od plošne korelacije koja upravlja direktno sa sivim vrijednostima, korelacija zasnovana na osobinama tekstura (engl. feature based matching) temelji se na usklađivanju istaknutih obilježja objekata, poput točaka, rubova ili područja. Prilikom mjerenja homolognih točaka snimki, operater pronalazi i koncentrira se na nagle promjene sivih tonskih vrijednosti koje često odgovaraju fizičkim granicama objektnog prostora prije nego samim sivim vrijednostima. Kada promatramo ljudski vizualni sustav kao superioran nad automatskim sustavom, korelacija zasnovana na osobinama tekstura je u boljem suglasju sa tim sustavom nego dvodimenzionalna korelacija (Schenk i Hofman 1986). Postupak korelacije zasnovane na osobinama tekstura sastoji se iz tri koraka:
Interesne točke Korelacija zasnovana na osobinama tekstura pokazuje najbolje rezultate na područjima velikih kontrasta. Postupak pronalaženja interesnih točaka temelji se na izračunu karakteristčnih parametara za svaki prozor na snimci, te usporedbi vrijednosti ovih parametara sa danim vrijednostima pragova. Karakteristični parametri različiti su za svaki operator, ali oni u osnovi ovise o sivim vrijednostima (teksture i strukture) unutar vrednovanog prozora. Samo prozori čije su vrijednosti parametara veće ili manje od danih pragova prihvaćaju se kao interesne točke. Rezultat ovog procesa je lista interesnih točaka za svaku od usklađivanih snimki sa njihovim slikovnim koordinatama i njhovim opisom (Potučkova 2004). Moravec operator temelji se na pretpostavci da interesna točka ima visoke varijance u svim smjerovima, npr. redak, stupac i obje dijagonale unutar prozora operatora (2k+1)×(2k+1) piksela. Interesna točka se prihvaća ukoliko je karakteristični parametar M (formula 6.5) veći od zadanog praga.
k definirana vrijednost prozora operatora m, n slikovne koordinate središta prozora operatora u slici g g (r, c) siva tonska vrijednost na poziciji (r, c). Förstner operator povezan je sa korelacijom po metodi namanjih kvadrata. Matrica kovarijance procijenjenih pomaka Σ glasi:
σ 0 standardna devijacija jedinice težina g R, g C gradijenti u smjeru retka i stupca Q matrica kofaktora. Bez poznavanja standardne dvijacije σ 0, oblik elipse pogrešaka (njezina velika i mala poluos) može se odrediti kao svojstvena vrijednost Λ={Λ 1, Λ 2} matrice kofaktora Q. Za dobro usklađivanje potrebno je zadovoljiti dva zahtjeva:
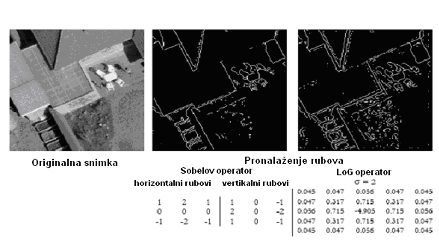
Upotrebom Moravec i Förstner operatora postiže se pronalaženje točaka sa potpiksel točnošću (Kraus 2006.). Računanja kod Moravec operatora su manje vremenski zahtjevna, ali Förstner operator postiže bolju preciznost, neovisan je o rotaciji i lokalne varijacije kontrasta na njega manje djeluju. Nakon odabira interesnih točaka na svim snimkama koje se usklađuju, potrebno je pronaći korespodentne točke. Najjednostavnije rješenje ovog problema temelji se na kombiniranju epipolarne geometrije i plošne korelacije pomoću koeficijenta korelacije. Točka s najvećim korelacijskim pogotkom smatra se homolognom točkom. Ona mora ispuniti dva uvjeta. Prvo, koeficijent korelacije mora biti veći od zadanog praga. Drugo, ta točka i interesna točka mogu doći samo u pojedinačnom paru. Postupak korelacije pomoću interesnih točaka manje je osjetljiv na šum i ostale smetnje, a nakon uklanjanja pogrešaka, mogu se postići standardne devijacije slikovnih koordinata σ 0 od 1/3 do 1/4 veličine piksela (F örstner, 1986). Izdvajanje rubova Operator za izdvajanje rubova (engl. edge operator) pronalazi razlike u sivim tonskim vrijednostima na snimci. Neki od operatora rubova (gradient operator i Sobel operator) zasnivaju se na računanju prve derivacije funkcije sive tonske vrijednosti – ekstrem prve derivacije, a zatim locira rubni piksel. Po jednoj osi djeluju kao aritmetička sredina, a po drugoj kao diferencijalni operator. Sobel operator je manje osjetljiv na šum zbog toga što uzima u obzir susjedne piksele (Potučkova 2004). Laplaceov operator pripada grupi operatora koji računaju druge derivacije. On je neovisan o smjeru djelovanja. Da bi prigušio šum u snimci, kombinira se sa Gaussovim operaterom koji "izglađuje" sliku. LoG operator (Laplacian of Gaussian) filtrira i pronalazi nul-točke simultano. Dobije se dvostrukim diferenciranjem Gaussove zvonkolike krivulje. Kako dvostruka diferenciranja u ograničenim razmacima teže drugim derivacijama i kako su druge derivacije također nađene pomoću Laplaceova operatora, ovaj se operator često navodi kao LoG (Laplacian of Gaussian) ( Slika 24) (Kraus 2006).
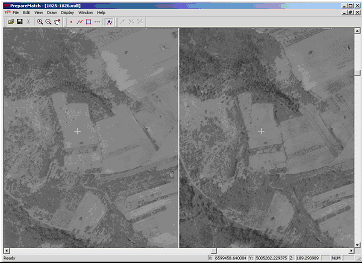
Slika 24. Slika prikazuje primjene Sobel i LoG operatora na dio zračne snimke (Potučkova 2004) 3.6.3. Usklađivanje snimki u programu VirtuoZoUkoliko snimke na kojima su prikazani neki od specifičnih topografskih podataka, poput hrbata, dolina, područja pokrivenih sjenama, velikih ravninskih područja ili vodenih područja, ovise jedino o automatskom usklađivanju, rezultati usklađivanja mogu biti nezadovoljavajući. Kod takvih područja VirtuoZo nudi modul Match Preparation, u kojem korisnik može učitati model i mjeriti točke, linije objekata i područja kako bi sugerirao programu u automatskom usklađivanju i postigao bolje rezultate usklađivanja. Nakon što su generirane epipolarne slike, korisnik može početi sa pripremom za usklađivanje. Odabirom naredbe Process > Prepare for Match u glavnom izborniku otvara se prozor PrepareMatch za pripremu podataka za usklađivanje. Naredbom File > Open Model u izborniku prozora PrepareMatch otvara se posebno lijeva i desna snimka modela ( Slika 25).
Slika 25. Prozor za pripremu podataka za usklađivanje Odabirom naredbe Process > Image Matching u glavnom izborniku pokreće se postupak usklađivanja. Kada proces završi, klikom na naredbu Process > Edit Match otvara se sučelje za uređivanje rezultata usklađivanja sa učitanim modelom ( Slika 26).
Slika 26. Sučelje za uređivanje rezultata usklađivanja Sučelje za uređivanje rezultata usklađivanja sastoji se od ploče sa funkcijama koja se nalazi u gornjem lijevom dijelu prozora i sadrži različite funkcije za uređivanje, preglednog prozora koji se nalazi u lijevom donjem uglu i prikazije cijelu sliku modela, te prozora za uređivanje koji se nalazi na desnoj strani i prikazuje uvećanu sliku područja odabranog u preglednom prozoru. Uređivanje rezultata usklađivanja obavlja se u ovom prozoru. U sučelju Edit Match prikazana je mreža usklađenih i visine paralaktičkih točaka u streoskopskom načinu rada. Korisnik može provjeriti da nema grubih pogrešaka i urediti visine točaka, linije ili područja. Rezultati uređivanja biti će spremljeni u datoteku usklađivanja snimki <ime modela>.plf. Kvaliteta uređivanja usklađivanja utjecati će na kvalitetu kasnije dobivenog DMV-a. Tipični slučajevi kod kojih je potrebno manualno uređivanje su:
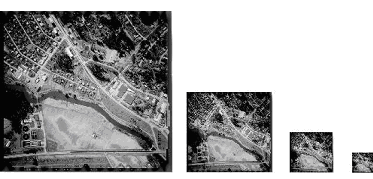
Primjeri: Ako prelaze preko zgrada, usklađene točke nalaze se na površini krovova zgrada, umjesto na tlu. Slojnice prelaze preko zgrada i ne pokazuju visinu tla. Potrebno je ručno editiranje. Klikom na desnu tipku miša otvori se padajući izbornik i odaberemo naredbu Polyline Start. Jedna po jedna, odabiru se točke na tlu tako da polilinija zatvori zgradu koju želimo urediti. Klikom na desnu tipku miša odaberemo naredbu Polyline Close i završimo operaciju. Pojave se sitne točkice koje pokazuju usklađene točke na označenom području. Najprije se odabere naredba Interpolate2. Izmjerene točke sada se nalaze na tlu oko zgrade. Zatim odaberemo algoritam smoothing. Ponovimo prvi i drugi korak za sve zgrade koje želimo urediti. Sličan postupak primjenimo i za područja pod vegetacijom. 3.7. Izrada digitalnog modela reljefa (DMR)Nakon usklađivanja snimki i uređivanja rezultata usklađivanja moguće je početi s izradom digitalnog modela reljefa i digitalnog modela visina. Digitalni model visina (DMV) je model koji se sastoji od dvodimenzionalne matrice visina koje su raspoređene u pravilnom pravokutnom ili šesterokutnom rasteru. Pojam elevacije obuhvaća mjerenje visine iznad određenog datuma, tj. elevacija je apsolutna visina neke točke u modelu. Digitalni model reljefa (DMR) je konceptualno složeniji pojam. DMR predstavlja računalnu apstrakciju terena vjernu stvarnosti do određenog stupnja generalizacije i obuhvaća podatke o visinama, interpolacijsku funkciju, ostale elemente oblikovanja (bridovi, karakteristične točke) i izvedene podatke o plohi terena (nagib, ekspozicija, zakrivljenost, vidljivost). DMV pojedinačnog modela leži u području jednog modela, a kreiran je iz podataka pojedinačnog modela. Algoritmi za automatsko generiranje DMR-a koriste normalizirane slike i slikovne piramide za dobivanje aproksimacija homolognih točaka. Slika 27. prikazuje načelo hijerarhijske višestupanjske korelacije (može se zamisliti piramida oblikovana od različitih razina). Geometrijska rezolucija po redovima i stupcima smanjuje se od razine do razine za faktor 2. Pikseli grublje rezolucije mogu se naći na nekoliko različitih načina: eliminacijom svakog drugog reda i piksela, nalaženjem prosječnih 2×2 piksela "finije slike", interpolacijom višeg reda, drugim operatorima deformacije. Metoda "piramide" iznimno je dobra za nalaženje prosječnih vrijednosti. Polazimo od grubljeg ka finijem: rezultati kod grublje razine daju početnu točku za korelaciju na finijoj razini (Kraus, 2006).
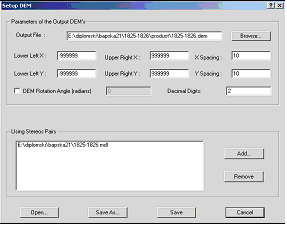
Slika 27. Primjer piramide slike U procesu epipolarnog preuzorkovanja originalne snimke preuzorkovane su sukladno uvjetima epipolarne geometrije. Takve snimke posjeduju dvije osnovne značajke: homologne točke pozicionirane su u istim redovima, i x-paralaksa (horizontalna paralaksa) između homolognih točaka proporcionalna je visini odovarajuće točke objekta. 3.7.1. Izrada digitalnog modela reljefa u programu VirtuoZoProgram VirtuoZo koristi metodu uzajamne korelacije u procesu usklađivanja snimki i u završnoj fazi provjerava jesu li rezultati usklađivanja za svaku točku konzistentni sa rezulatatima u njezinom susjedstvu i na taj način pronalazi grube pogreške. Program koristi pravilnu mrežu u slikovnom prostoru, prema tome potrebna je naknadna interpolacija DMR mreže. Odabirom naredbe Setup > DEMs u glavnom izborniku otvara se dijaloški okvir Setup DEM ( Slika 28).
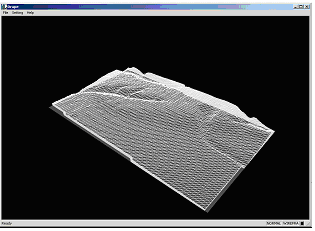
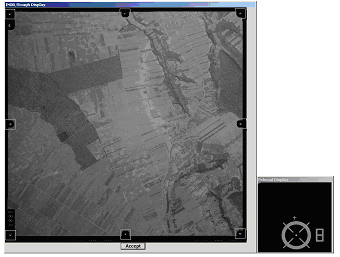
Slika 28. Dijaloški okvir za postavljanje parametara DMV-a U dijaloškom okviru podese se parametri poput naziva izlazne datoteke (Output File), geodetske koordinate donjeg i gornjeg kuta DMV-a (Lower Left X, Lower Left Y, Upper Right X, Upper Right Y), horizontalni interval i vertikalni interval mreže DMV-a (X Spacing, Y Spacing), broj znamenki iza decimalne točke (Decimal Digits), i odabere se stereomodel za koji će se kreirati DMV. Odabirom naredbe Save zadani parametri DMV-a spremaju se u datoteku <ime stereomodela>.dpt. Nakon podešavanja parametara, odabirom naredbe Products > Create DEM > DEM(M) program će najprije automatski generirati DMR, a zatim DMV za odabrani model. Odabirom alata Drape u izborniku View > Drape > Stereo moguće je vidjeti prikaz kreiranog DMV-a. Postoje tri različita prikaza: žičani model, model u boji i teksturirani model. Odabirom naredbe View > Drape > Wire Frame otvara se prozor u kojem je DMV prikazan žičanim modelom ( Slika 29).
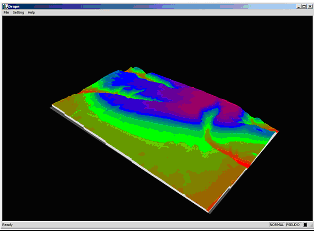
Slika 29. DMV prikazan žičanim modelom Odabirom naredbe View > Drape > Pseudo Color dobivamo prikaz pomoću hipsometrijske skale boja ( Slika 30).
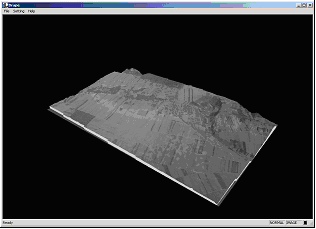
Slika 30. DMV prikazan hipsometrijskom skalom boja Nakon što je izrađen digitalni ortofoto, u VirtoZo-u je moguće izraditi interaktivni trodimenzionalni perspektivni prikaz odabranog područja. Naredbom View > Drape > Image projicira se ortofotografija na DMV i dobiva se trodimenzionalni perspektivni prikaz sa stvarnim teksturama ( Slika 31).
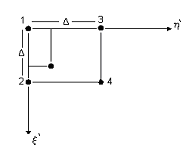
Slika 31. Perspektivni prikaz sa stvarnim teksturama Alat Drape ima opciju interaktivnog prikazivanja izrađenog modela, pa tako korisnik može istraživati prikaz iz različitih kuteva gledanja, približavati se nekom detalju ili udaljavati. Prikaz se može rotirati tako da pokazivač postavimo na prikaz, držimo desnu tipku miša i pomičemo miš tako da rotiramo prikaz. Ako držimo lijevu tipku miša i pomičemo miš naprijed-nazad dobivamo dojam da se približavamo ili udaljavamo od prikaza. 3.8. Izrada digitalnog ortofota (DOF)Proizvodnja digitalnog ortofota sastoji se iz više koraka. Kao prvo, potrebno je imati digitalne snimke. Digitalna snimka može biti dobivena na dva načina: direktno - korištenjem digitalne kamere ili senzora ili indirektno - skeniranjem analognih snimki. U postupku skeniranja slika se zapisuje kao dvodimenzionalna matrica G, koja se sastoji od slikovnih elemenata g i,j (piksela). Pozicija svakog piksela u slikovnoj matrici određena je rednim brojem retka i stupca u kojem se piksel nalazi. Dimenzija piksela određuje rezoluciju rasterske slike. Središtu svakog piksela dodijeljuju se slikovne koordinate. Svaki piksel poprima jednu sivu tonsku vrijednost od 0 (crna) do 255 (bijela). Veličina piksela direktno utječe na kvalitetu i točnost zapisa. Smanjivanjem veličine piksela, povećava se količina podataka, a time se proširuje zapis, što usporava pa čak i ometa daljnju obradu. Veličina piksela u originalnoj slici, iz koje je izrađena digitalna ortofotografija Bapska-Gradac iznosi 21 µm. Postupak izračuna digitalne ortofotografije može se podijeliti na geometrijsku korekciju (korigiranje mjerila i perspektive) i tonalnu korekciju (korigiranje intenziteta crne boje) skenirane digitalne snimke. Nakon skeniranja, digitalni zapis smješta se u koordinatni sustav skenera. Pozicija piksela izražava se cjelobrojnim koordinatama (prva koordinata predstavlja redni broj retka, a druga redni broj stupca), a ishodište sustava nalazi se u gornjem lijevom uglu. Proizvodnja digitalnog ortofota počinje s definicijom tražene slikovne matrice u ravnini X,Y referentnog koordinatnog sustava, praćenog transformacijom središta ovih elemenata u koordinatnom sustavu kamere ( Slika 32).
Slika 32. Relacija između slikovnih matrica u referentnom i slikovnom koordinatnom sustavu (Kraus 2006) Nakon toga potrebno je izvršiti unutarnju i vanjsku orijentaciju originalnih digitalnih slika. Kada su nam poznati orijentacijski parametri, središta piksela u referentnome koordinatnom sustavu mogu se transformirati u originalnu digitalnu sliku pomoću jednadžbi centralne projekcije. Odnos između koordinata x i η točke P' na snimci i koordinata X,Y,Z objektne točke P matematički je formuliran u jednadžbama:
(8.1)
Parametri r ik su elementi prostorne matrice rotacije R. Elenemti r ik mogu se izraziti kao funkije tri kuta rotacije ω,φ,κ. Stvaranje epipolarnih slika, usklađivanje snimki i editiranje rezultata usklađivanja direktno utječu na generiranje DMV-a. Kada postoje digitalne slike, elementi orijentacije i DMV, izračun ortofota postaje jednostavan automatiziran postupak. U ovom postupku (ortorektifikacija) gustoće originalnih slika pridružuju se transformiranim središnjim točkama. Mogu se koristiti različite interpolacijske funkcije, a neke od standardnih metoda su: pridruživanje "najbliže susjednom", bilinearna transformacija, kubična interpolacija. Postoje još sofisticiranije metode poput sin(x)/x funkcije za "8 pix" i "16 pix" prozore, kao i metode zasnovane na digitalnom filtriranju - osrednji, medijan, Gaussian filter. Izbor interpolacijske funkcije utječe na brzinu procesiranja i točnost interpoliranja. Najbolje poznato pridruživanje je ono "najbliže susjednom". U ovom postupku usvaja se tonska vrijednost piksela čije je središte najbliže transformiranoj točki. U poziciji 3, 4 (3. red, 4. stupac) primjera ortofotografije sa Slike 32. imamo tonsku vrijednost g 2,3 matrice u originalnoj slici. U položaju 4, 4 imamo tonsku vrijednost g 2,2, itd. Ova metoda nije vremenski zahtjevna. Međutim, nedostatak metode je da su, u najgorem slučaju slikovni elementi pomaknuti za 0,5 piksela. Relativno premještanje piksela može se dogoditi u linijama kod digitalnog ortofota. Radi osiguranja da se neće izgubiti piksel u originalnoj slici, broj piksela u digitalnoj ortofotografiji trebalo bi odabrati tako da bude znatno veći nego u originalnoj slici. Kod ravnog terena višak od oko 25% zadovoljava; za zemljište s velikim visinskim razlikama savjetuje se udvostručenje broja piksela (Kraus 2006). Zanimljiva alternativa metodi najbližeg susjeda je bilinearna transformacija. Kod te metode tonska vrijednost se utvrđuje bilinearnom transformacijom od četiri susjeda ( Slika 33). Četiri tonske vrijednosti g 1, g 2, g 3 i g 4 originalne slike određuju hiperbolički paraboloid kvadrata strane D ako pretpostavimo linearnu interpolaciju paralelnu koordinatnim osima. Bilinearna interpolacija zahtijeva više truda od metode najbližeg susjeda, ali prednost je u tome što nema prekida u linijama. Međutim, kontrast originalne slike je za mali iznos promijenjen (Kraus 2006).
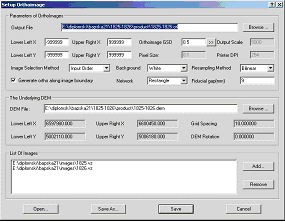
Slika 33. Bilinearna interpolacija gustoća (Kraus 2006) Nakon što je dobivena ortofotoslika, moguće je nastaviti sa daljnjim procesiranjem slika s namjerom da se korigiraju radiometrijski nedostaci. 3.8.1 Izrada digitalnog ortofota u programu VirtuoZoOdabirom naredbe Setup > Orthoimages u glavnom izborniku otvara se dijaloški okvir Setup Orthoimage ( Slika 34).
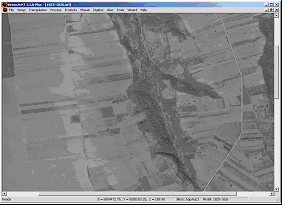
Slika 34. Dijaloški okvir za podešavanje parametara ortofotoslike Klikom na tipku Save, program sprema zadane parametre i vraća korisnika u glavno sučelje. Odabirom naredbe Products > Orthorectify u glavnom izborniku automatski će se generirati ortofotoslika. Datoteku ortofotoslike program će spremiti u <ime stereomodela>.orl ili <ime stereomodel>.orr. Nakon izrade, ortofotoslika može se prikazati na zaslonu odabirom naredbe View > Ortho Image ( Slika 35).
Slika 35. Prikaz izrađene ortofotoslike na zaslonu monitora Na nekim područjima mogu se javiti deformacije na ortoslici (npr. distorzija, "blurring", preklapanje i sl.). Ovaj problem može se riješiti izrezivanjenjem djelova originalne slike i ubacivanjem u kreiranu ortofotosliku. Modul OrthoFix služi za obnavljanje (engl. restoration) ortoslika korištenjem drugih slika. OrthoFix modul pokreće se odabirom naredbe Mosaic > OrthoFix u glavnom izborniku.
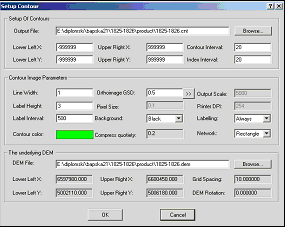
3.9. Automatsko generiranje slojnicaNakon što je kreiran DMV, moguće je automatski generirati slojnice za zadano područje. Klikom na naredbu Setup > Contours u glavnom izborniku otvara se dijaloški okvir Setup Contour ( Slika 36) u kojem je moguće podesiti parametre za slojnice koje će biti kreirane.
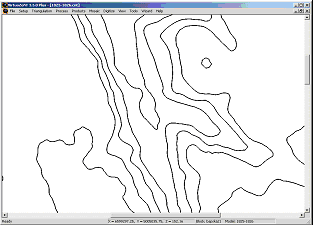
Slika 36. Dijaloški okvir za podešavanje parametara slojnica U tekstualnom okviru The underlying DEM potrebno je zadati datoteku DMV-a na osnovu koje će biti kreirane slojnice. Klikom na naredbu OK program će zapamtiti postavke za slojnice i vratiti korisnika u glavno sučelje. Kreiranje slojnica pokreće se odabirom naredbe Products > Create Contours u glavnom izborniku. Slojnice za zadani model biti će kreirane automatski. Tri nove datoteke (<ime modela>.cnt, <ime modela>.cvf i <ime modela>.lab) biti će spremljene u direktorij <ime direktorija bloka>/<ime modela>/<produkti>. Odabirom naredbe View > Contour Image u glavnom izborniku otvara se prozor ( Slika 37) u kojem su prikazane kreirane slojnice.
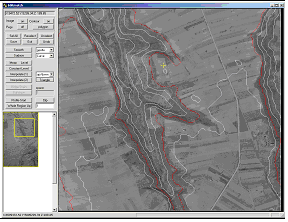
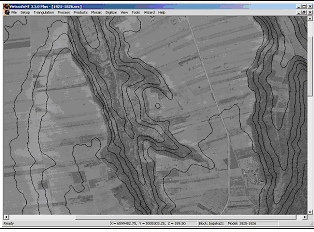
Slika 37. Prozor za prikazivanje slojnica Ukoliko postoje kreirane slojnice i odgovarajuća ortofotoslika za zadani model, moguće je slojnice preklopiti sa ortofotoslikom i na taj način kreirati novu ortofotosliku sa ucrtanim slonicama. Klikom na naredbu Products > Contour Overlay program će automatski generirati prekrivajuću sliku (engl. overlay image) za ortofotosliku i slojnice. Kreirana datoteka <ime modela>.orc biti će spremljena u direktorij "product" odgovarajućeg modela. Kreirana slika može se pogledati odabirom naredbe View > Contour Overlay ( Slika 38).
Slika 38. Ortofotoslika sa ucrtanim slojnicama
|
|||||||||||||
| Izradila: Ana Kuveždić, siječanj 2006 | |||||
|---|---|---|---|---|---|

 (5.1)
(5.1) (5.2)
(5.2) 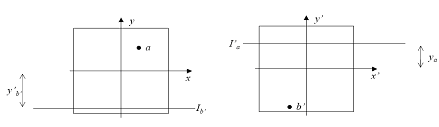
 (5.10)
(5.10) (6.1)
(6.1)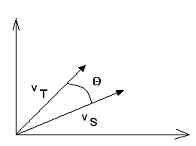
 (6.5)
(6.5) (6.6)
(6.6)